SOFTWARE - HOVERCRAFT
SPECTRE Software
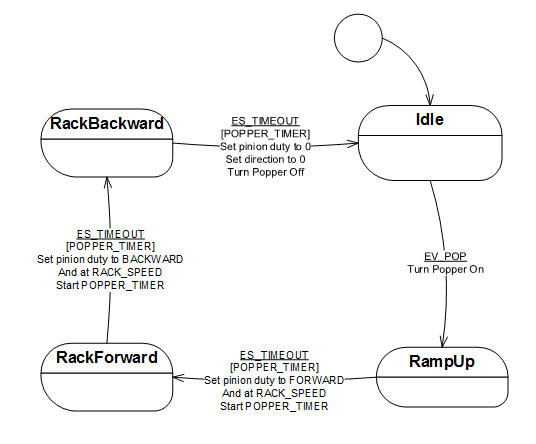
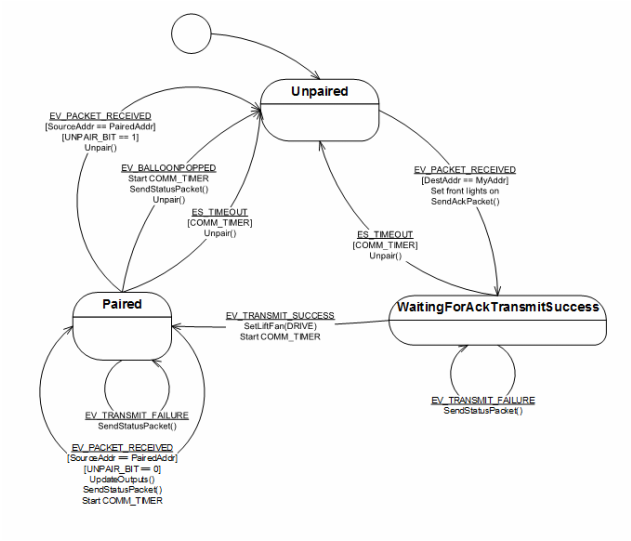
We programmed a TIVA microcontroller to control our SPECTRE. The brains of the communication protocol are contained in Tiva_XBee_Comm, a state machine that keeps track of whether the hovercraft is unpaired, paired, or in a waiting state for acknowledgement of transmission. UART communication is handled in TX_SM and RX_SM, which handle the transmission and reception of messages from the XBee, respectively. IO_Service takes care of all the PWM controls and initializations for the hardware on the SPECTRE. The SPI module is responsible for communicating with an Arduino Uno with a BNO055 9-axis Bosch sensor. By reading the gyroscope data from this sensor and transferring it over SPI, we implemented yaw rate control to stabilize our SPECTRE. PopperSM just takes care of the balloon popper action of moving the rack and pinion forward and back, while activating the "weed whacker." The .c and .h files are included in the folder below for your viewing pleasure.
| spectre_code.zip |
SPECTRE Pseudo Code
| spectre_pseudo_code.pdf |
SPECTRE State Charts
XBeeComm SM
Balloon Popper SM