MECHANICAL - HOVERCRAFT
Hovercraft Chassis |
|
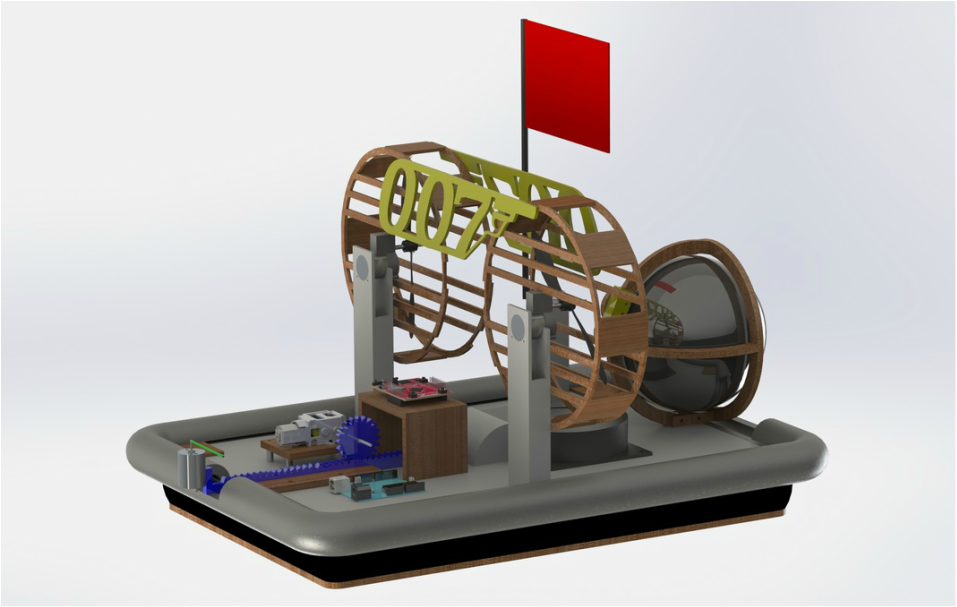
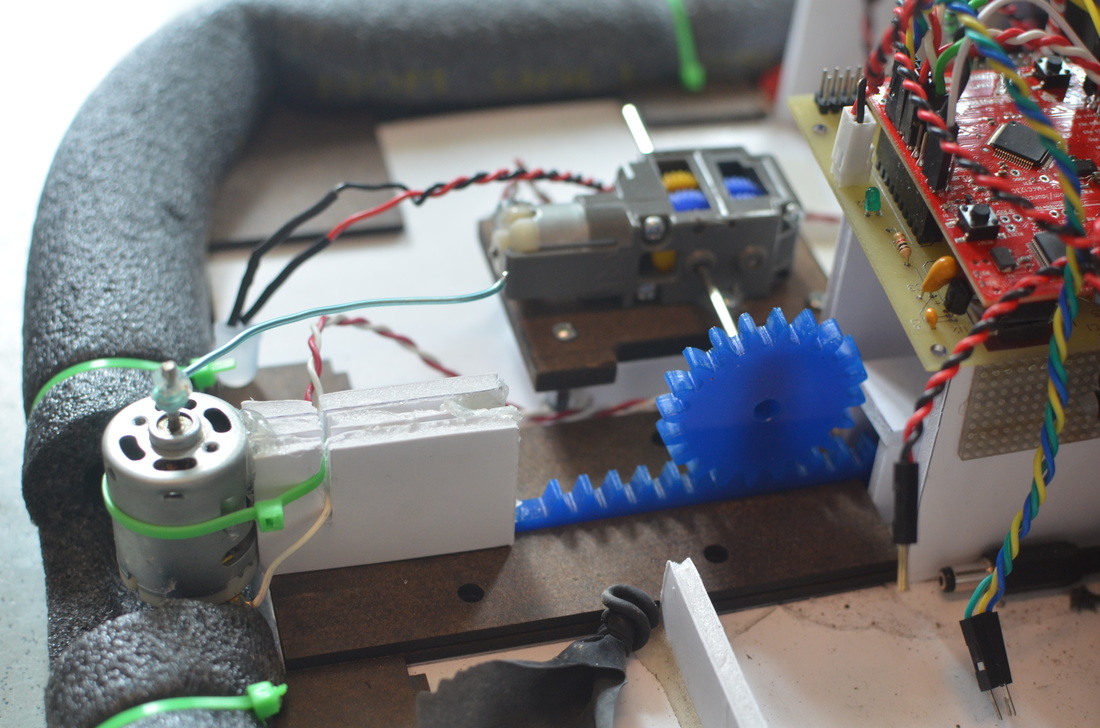
We built a modular chassis out of laser-cut foam core and Duron that allowed plenty of space for the motor shrouds and all of our circuits. We built the skirt out of a lightweight nylon fabric to allow for the air seal to conform to the terrain. We sandwiched the bottom of the skirt between two layers of Duron with identical perimeter to the upper chassis in order to ensure that the skirt ballooned out evenly on all sides of the rectangular chassis. Below, you can see a drawing of the hovercraft with relevant dimensions to get an idea of scale.
|
|
|
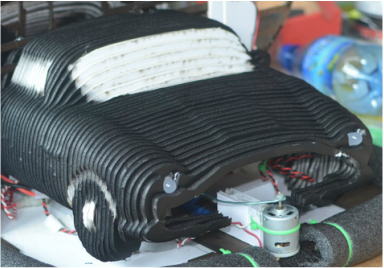
Aston Martin DB5 ContourThough we originally attempted to vacuum form the outer hull of the car by slicing up an existing CAD file of a DB5, we realized we liked the resolution that the individual slices provided better. We therefore laser-cut these slices out of foam core and spray painted the hull black. We split the hull into three pieces - one that covered the balloon popper and circuitry in the hood, one that covered the extraneous circuitry in the back, and one that connected the other two in between the motor shrouds.
|
|
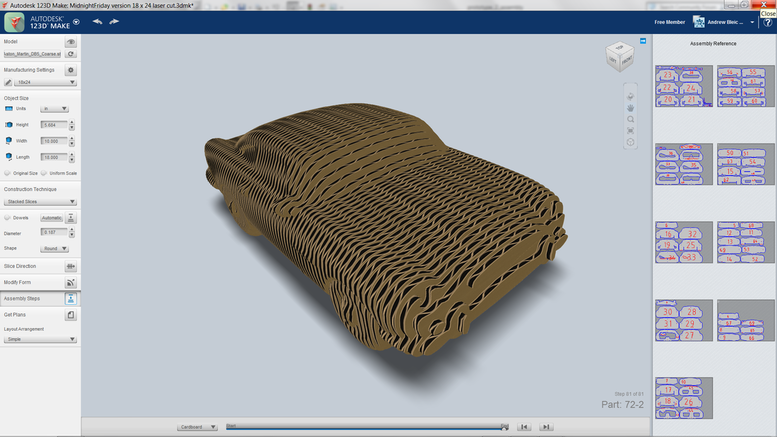
Autodesk 123D Make screenshot of our virtual slices. Exported files to laser cut on the right hand side.
Mind-control IndicatorIf a hovercraft had its balloon popped, it was required to unpair from its controller and display an electromechanical indicator that it was now in the "mind-controlled" state, meaning that it could now be controlled by any other available controller for the purposes of helping the evil DrEd. We could imagine no worse fate for James Bond than being captured and imprisoned by the KGB, so upon popping of our balloon, we raised a Soviet flag attached to a mini servo.
|

|
|
|
|
|
PID Control and ThrustersEarly on in the project, we decided that it would be awesome to integrate some sort of PID control for our hovercraft since we were each given a 9-axis Bosch sensor. Initially, we tried implementing absolute orientation control, which was a total disaster for a variety of reasons. First off, given that the response time of a hovercraft can be on the order of seconds, it was nearly impossible to steer because there was no way to know where exactly you were setting the desired orientation. The hovercraft would also oscillate around the desired orientation which was not ideal. So, we switched to yaw rate control. Sampling the gyroscope data, i.e. the rotational velocity, we took the user input from the gun and set that as the desired rotational velocity. The duty cycles of the thrusters were then adjusted in a PID loop that took the error between desired and current rotational velocity. Our performance also improved drastically once we implemented reverse thrusting. This allowed us to quickly turn while stationary which was crucial for avoiding other SPECTRE's. The video below shows initial testing in the "Terman Swamp," the initial location of the competition. Each turn made is the result of the user making a hard turn one way and then letting the PID control counter steer to a stationary position.
|
